← Back to list
3A
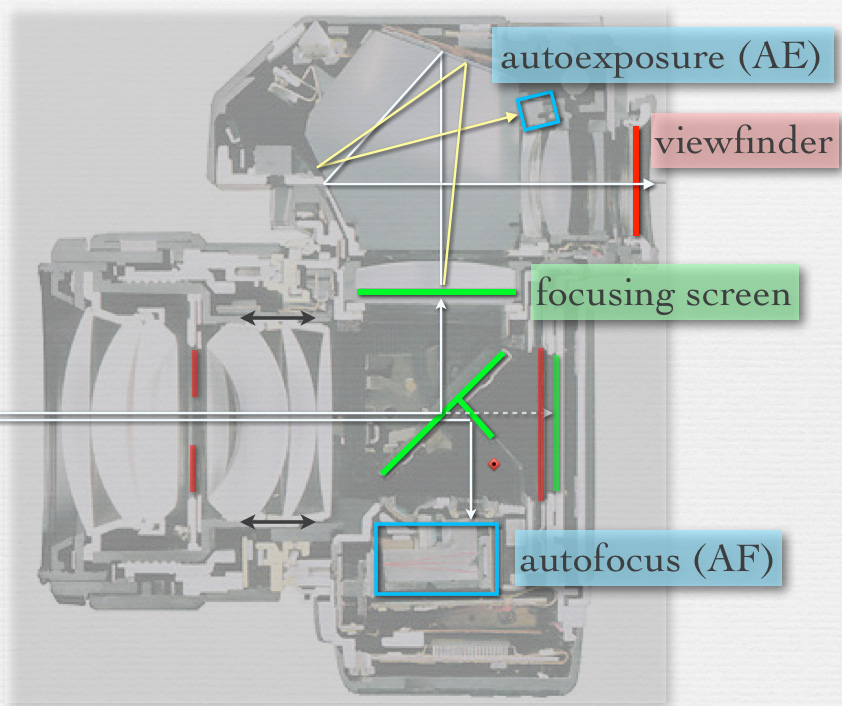
SLR
Structure
- With half-silvered mirror down,
- some light is shunted to AF, remainder reflected up to form image on diffuse focusing screen
- AE and viewfinder sees from the same side of the mirror.
- AE light meter sees focusing screen; viewfinder sees with the same perspective as main sensor
- With mirror rotated up, light exposes to the main sensor. Taking pictures.
Viewfinders
- Coverages and Magnification
- Coverage is fraction of sensor image covered by the viewfinder: $\frac{\text{area of focusing screen}}{\text{main sensor area}}$
- Magnification is apparent size of objects in viewfinder relative to unaided eye: $\frac{\theta_{\text{viewfinder angle range}}}{\theta_{\text{eye angle range}}}$
- Electronic viewfinders
- Pros: same view as lens without reflex mirror; tone map to show effect of chosen exposure
- Cons: poor resolution, low dynamic range relative to optical
Tilt-shift Lenses
- Adjust the plane of focus to make the entire scene sharp
- Simulate a macro lens with a shallow depth of field, hence makes any scene look like a miniature model
- Not a tilt-shift lens, gradient blur can “fake” the tilt-shift lens effect
/
Auto Focus
Active or Passive: the position and directions of the illumination is known or unknown
- Active systems: some kind of radiation is send towards the scene (sonar, laser, structured light, etc.) Its refection from objects in the scene is captured by the camera’s main sensor or another sensor and analyzed using triangulation to determine the objects’ distance from the camera.
- Polaroid system uses ultrasound
- Sonar: sound navigation and ranging
- limited range, stopped by glass
- Passive systems: nothing is sent towards the scene. The scene is captured under its own abmient illumination. This image is analyzed to determine distance.
- Some passive system uses additional illumination during focusing, called an autofocus assist light (pariticularly useful if the scene is dark)
- Some passive system projects a grid or texture onto the scene to aid with analysis (useful for textureless surfaces) (Not AF:RealSense emitter mode with projecting known structured IR light onto the scene)
Triangulation Rangefinding(active autofocus)
- Infrared LED flash reflects from subject; angle of returned reflection depends on distance; fails on dark or shiny objects
- Laser sheet illuminates a curve on the object; distance from left edge of image gives distance from laser; move object or sweep laser to create range image $z(x,y)$
- Commonly used to digitaltize physical maquettes to ease creation of 3D CG models
Phase Detection (shape from stereo algorithm, passive autofocus)
- Most common type of passive autofocus method used in single-lens reflex (SLR) cameras.
- In AF module
- Two or more small image sensors (1D i.e. a row of pixels, in pairs), each one having a microlens above it
- Each pair of sensors constitiutes one AF point, looks at one part of the camera’s FOV
- As lens moves, ray bundles from an object onverge to a different point in the camera and change in the optical axis
- This change causes them to refocus through two lenslets to different positions on a separate AF sensor
- A certain spacing (disparity) between these images is “in focus” $\rightarrow$ similar to simple stereo for a camera
- Process: 1D images are captured and read off the chip $\rightarrow$ embedded processor (cross-correlation, etc.)
- Pros and cons
- Pros: Fast
- Cons: Only be used when relfex mirror is down
- Algorithm also used for tracking motions and light field(set of all positions and directions of light rays traveling through space, using a microlens array in the optical train in the optical train of a camera/microscope, i.e. Shack-Hartmann wavefront sensor)
Contrast Detection (shape from focus algorithms, passive autofocus)
- Processed after main sensor capturing; no limit on the number and placement of the autofocus points
- Process
- Assume the unseen object is a single bright point on a black background
- As the position moves closer to the focus, the breadth of the spot formed on the sensor decreases and its center becomes brighter $\rightarrow$ find the maximum intensity or gradient (local maximum)
- Find the gradient within a small neighborhood of pixels, if exceeds a certain threshold, the system is declared well focused
- For objects naturally has slowly varying intensities (e.g., skies, human skin), the gradients will be modest even in good focus
- Pros and cons
- Pros: requires only local operatprs; accuracy and potentially larger array of AF points; flexibility (can choose point on screen); not affected by front and back focusing issues
- Cons: requries capturing multiple images; goes beyond focus and come back (hunting) $\rightarrow$ slow
Canon’s Dual Pixel CMOS AF
- Each CMOS unit pixel consists of two independent photodiodes
- One gathers light, the other serves as phase detection AF
- If the two beams of light don’t converge to the center of the sensor, out of focus
- Fast
Hybrid AF
- Phase detection to achieve a fast AF $\rightarrow$ Activate contrast AF to fine-tune
Auto Exposure
Auto White Balance